Education
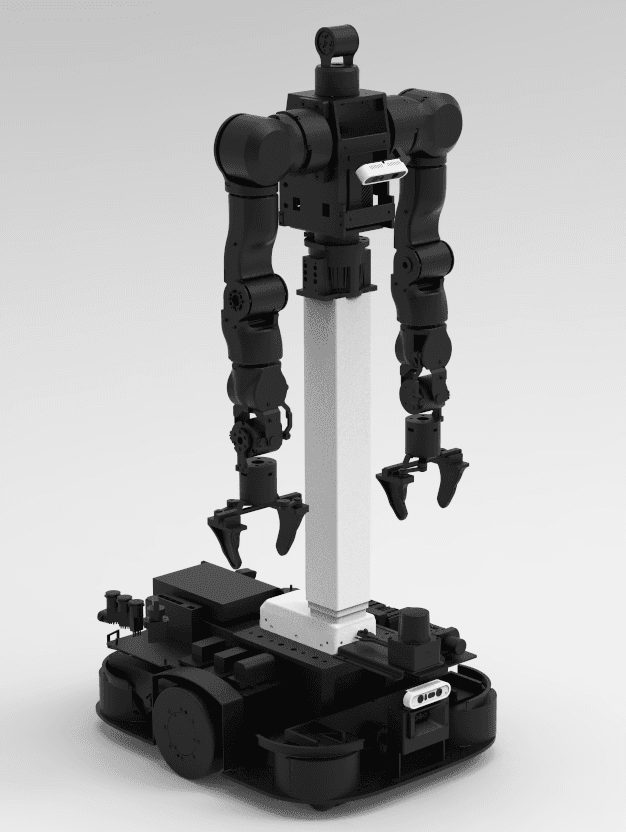
PR X1 Edu
$4,380from
For classroom teaching and curious beginners — it ships with a standard open-source curriculum, a gentle first step into embodied AI.

- LiDAR navigation + OpenArm
- Open documentation & onboarding
- Open-source teaching demos
- ROS + Python support
- Community support & deployment guidance